Abstract
Preference-based reinforcement learning (PbRL) learns policies from human trajectory-level comparisons, avoiding explicit reward design and expert demonstrations. Existing methods typically train utility functions on trajectory or segment-level preferences while relying on per-step utility estimates during policy optimization. This training and inference mismatch induces a distribution shift that severely degrades temporal credit assignment and limits policy learning. We analyze this issue and propose Preference Learning with Advantage-Weighted Segments (PAWS), a segment-based preference learning method that performs policy updates directly using segment-level advantage functions. By aligning utility training with policy optimization, PAWS preserves trajectory-level preference information and avoids unreliable per-step learning signals. Experiments on simulated robotic manipulation and locomotion tasks demonstrate that PAWS consistently outperforms existing PbRL approaches, highlighting the importance of distribution-consistent preference learning.
The Training–Inference Mismatch
Most PbRL methods train a reward or advantage model on segment-level comparisons, but then query that model at the level of individual state–action pairs during policy optimization. Because the preference loss only constrains the sum of per-step advantages within a segment, many distinct per-step assignments explain the same preference label. This leaves temporal credit assignment fundamentally ambiguous and injects distribution shift into policy learning.
Our Approach: PAWS
PAWS keeps training and inference distribution-consistent by using the learned advantage function directly on trajectory segments during policy optimization:
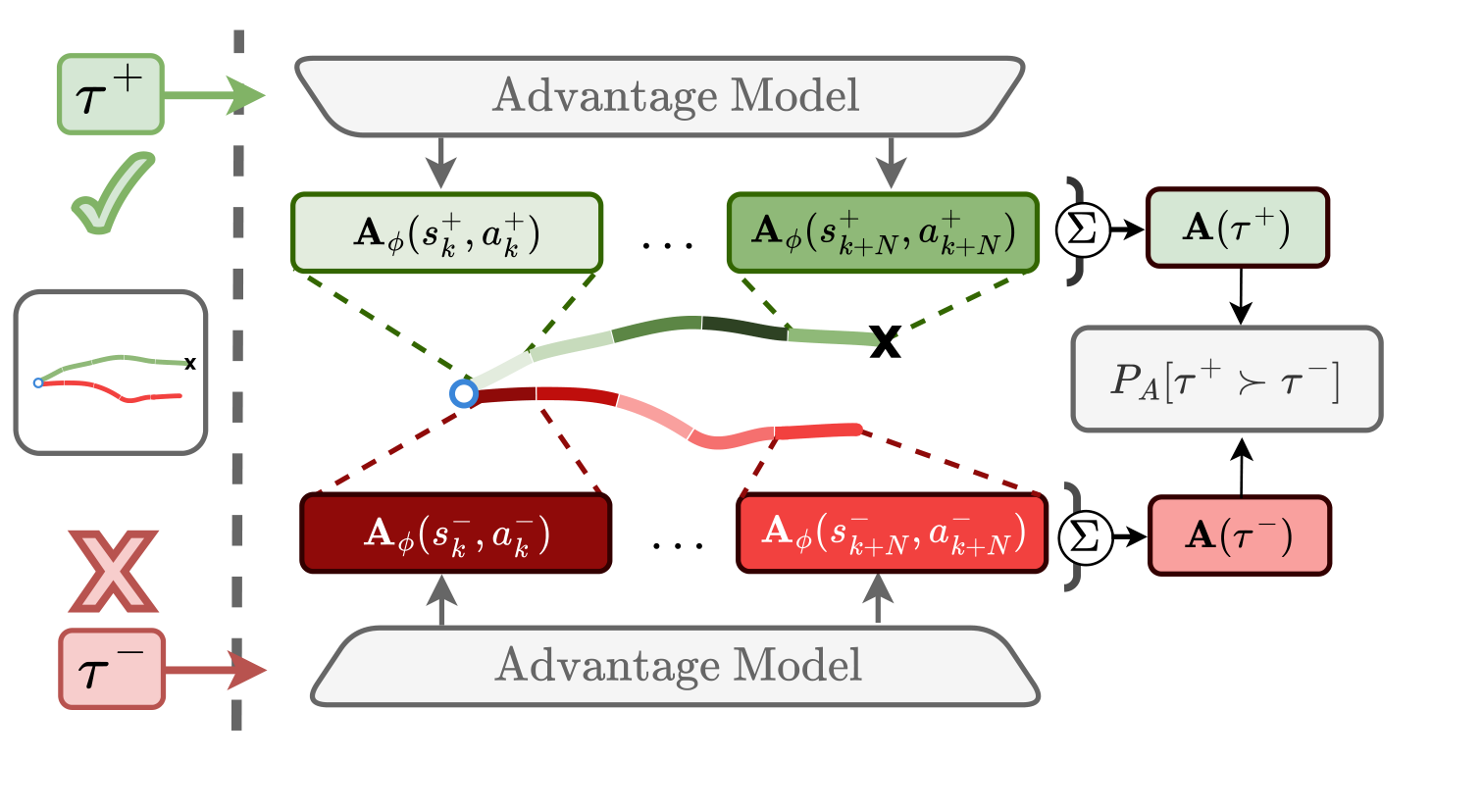
- Advantage learning. An advantage function Aφ is trained on segment-level preferences via a Bradley–Terry objective over the difference in cumulative segment advantages. Both an MLP and an encoder-only Transformer parameterization are supported.
- Segment-level policy update. A trust-region-constrained optimization in segment space yields a reweighted segment distribution p*(τ) ∝ pD(τ) exp(Aφ(τ)/λ). Projecting it back onto the policy gives a weighted maximum-likelihood update where every step in a segment shares the segment's advantage weight, never a per-step utility estimate.
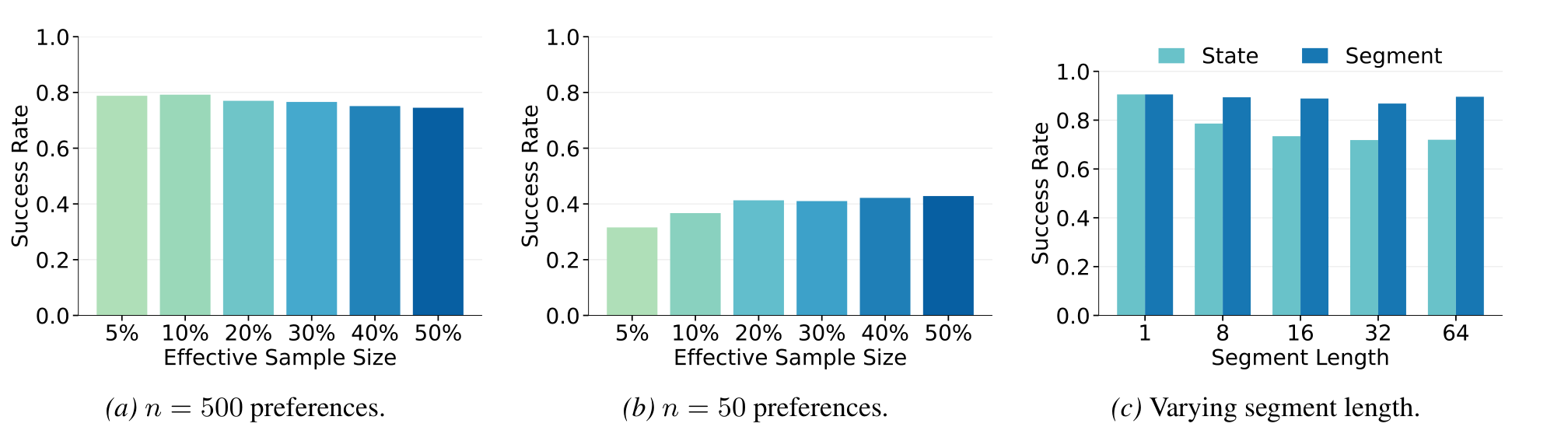
- Data-driven step size. Instead of hand-tuning the KL trust region ε, PAWS sets it automatically from a target effective sample size neff, an intuitive knob describing how many preferences meaningfully contribute to each policy update.
Contributions
- We analyze temporal credit assignment in PbRL through the lens of a training–inference distribution shift, identifying it as a core limitation of existing methods.
- We propose PAWS, a segment-based preference learning method that aligns utility training with policy optimization, enabling reliable propagation of preference signals.
- We introduce an intuitive, data-driven strategy for setting policy-optimization hyperparameters based on the effective sample size of preference-weighted data.
- We validate PAWS on diverse simulated manipulation and locomotion tasks, with both oracle and real-human preferences, showing consistent gains over established baselines.
Results
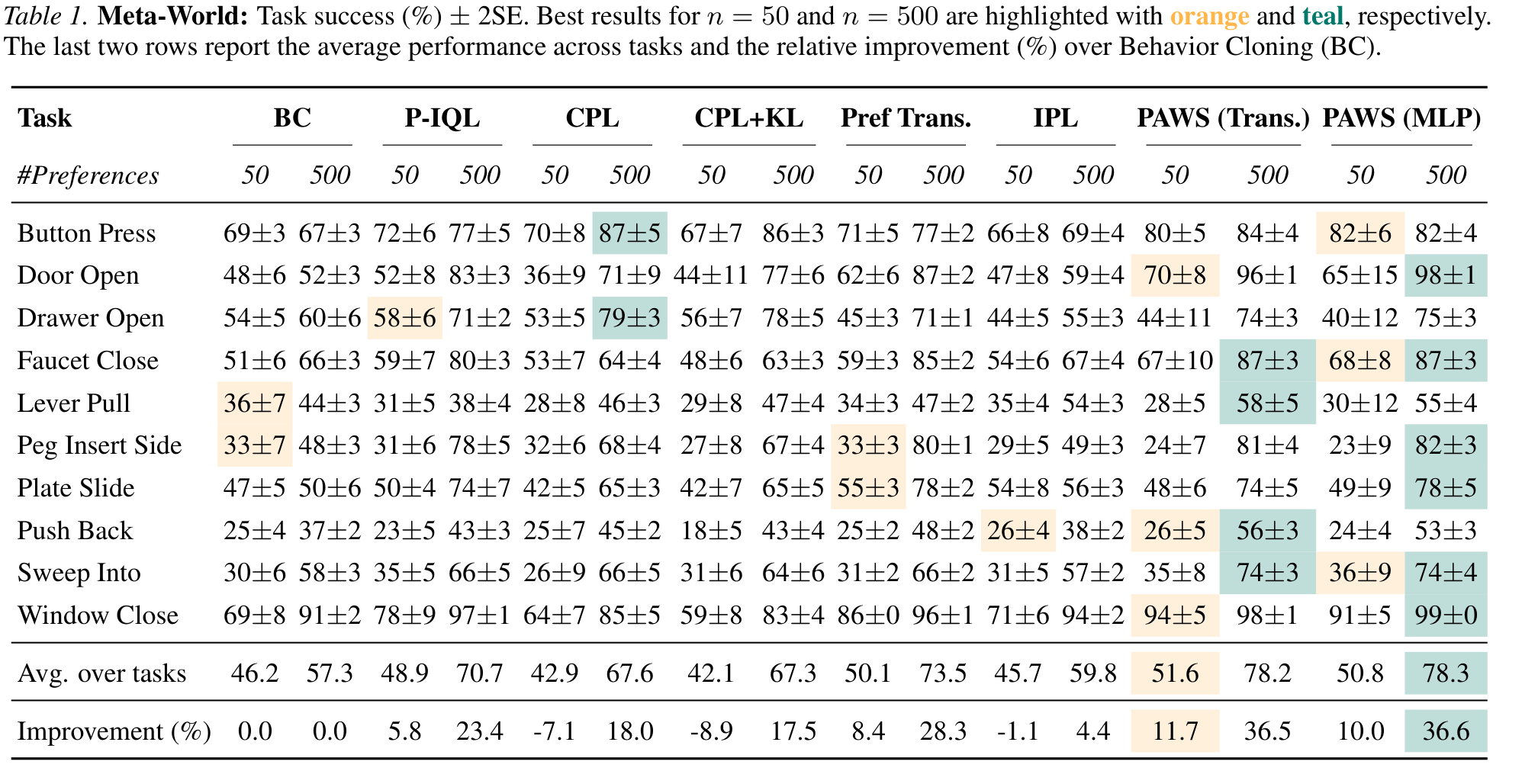
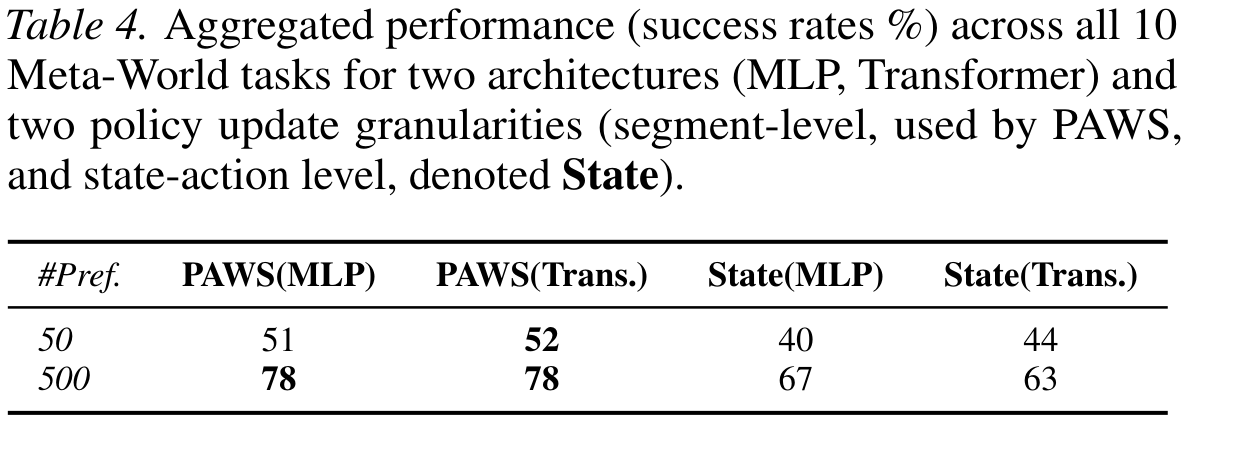
Meta-World Manipulation
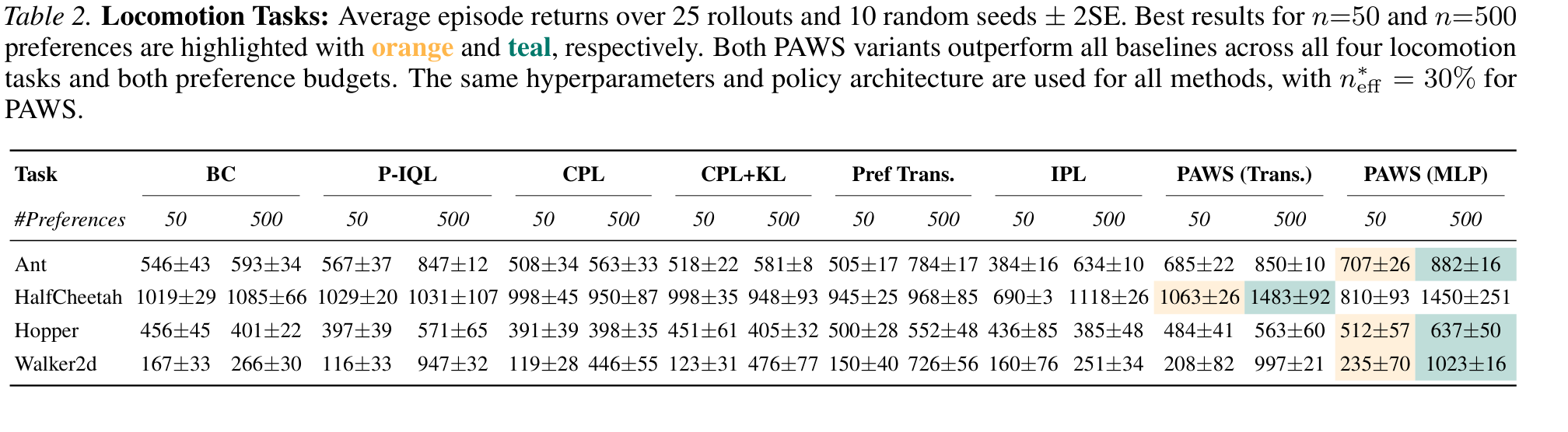
Locomotion
Real Human Preferences
Beyond oracle labels, we collected 50 pairwise comparisons per task from each of 10 non-author human labelers on Button Press and Door Open. Each seed was trained on the labels of a single distinct labeler, so the variance reflects both seed and labeler variability.

Segment- vs. State-Action-Based Updates
The core claim of the paper made measurable: querying the same learned advantage function per-step instead of per-segment reintroduces the distribution shift and costs up to 15 points of success rate. Shortening segments at update time degrades performance monotonically even when the advantage function itself was trained on long segments.

Ablations
To quantify temporal credit assignment directly, we also measure Spearman's rank correlation between each learned policy's action likelihoods and the expert's: segment-based updates preserve the expert's ranking far better (rs = 0.22) than per-step updates (rs = 0.05).
BibTeX
@inproceedings{taranovic2026paws,
title={PAWS: Preference Learning with Advantage-Weighted Segments},
author={Aleksandar Taranovic and Onur Celik and Niklas Freymuth and Ge Li and Serge Thilges and Huy Le and Tai Hoang and Rania Rayyes and Gerhard Neumann},
booktitle={Forty-third International Conference on Machine Learning},
year={2026},
url={https://openreview.net/forum?id=IPeIlnJzYa}
}